| www.ethlife.ethz.ch |
|
Rubrik: Tagesberichte Miniroboter der ETH infiltriert Insektenpopulation Roboter manipuliert Kakerlaken |
Published: 13.12.2006 06:00 Modified: 12.12.2006 14:37 |
|||||||||||
|
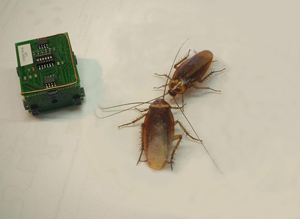
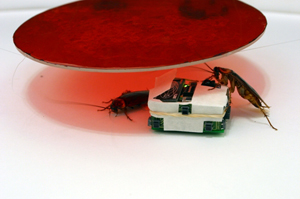
Einen winzigen Roboter zu konstruieren, der die Fähigkeit besitzt, von Kakerlaken als Artgenosse akzeptiert zu werden – dieses Ingenieurkunststück gelang kürzlich der Gruppe des ETH-Professors Roland Siegwart. Dabei ist es den Insbots (Insect Robots) sogar möglich, das kollektive Verhalten der Insekten so zu beeinflussen, dass sie sich an einem vorbestimmten Ort versammeln. Diese Arbeit könnte einen Beitrag für eine schonende Bekämpfungen von Schädlingen liefern. Basil Honegger Kakerlaken und Miniaturroboter wuseln kreuz und quer durcheinander, und versammeln sich kurze Zeit später wie auf Kommando unter einer roten Plexiglasscheibe, die als Unterschlupf dient. Die ungleichen „Kreaturen“ interagieren miteinander, als ob es das Natürlichste der Welt wäre und sie sich gegenseitig erkennen würden. Dieses eigenartige Bild, das sehr stark an Science Fiction erinnert, präsentierte sich dem Zuschauer in einem Beitrag des belgischen Fernsehens. Doch wie kam es dazu? Das am Fernsehen gezeigte Experiment war Teil des europäischen Forschungsprojekt LEURRE (Köder)(1) , an welchem die Gruppe des ETH-Professors Roland Siegwartvom Institute of Robotics and Intelligent Systems (2) , damals noch an der EPF in Lausanne tätig, massgeblich beteiligt war. Im Rahmen dieses Projektes, welches zusammen mit belgischen Biologen an der Universität Brüssel durchgeführt wurde, ging es darum zu zeigen, dass Tiere und Roboter miteinander in Kontakt treten und sich gegenseitig beeinflussen können. „Ein Aspekt dabei war auch, dass die aus diesen Experimenten gewonnenen Erkenntnisse eines Tages zur Schädlingsbekämpfung eingesetzt werden könnten“, erklärt Siegwart die Ausgangslage. Kakerlaken zeigen simple VerhaltensmusterEine Schädlingsart, die sehr schwer zu bekämpfen ist, da handelsübliche Insektenvertilger keinen befriedigenden Erfolg aufweisen, sind die Kakerlaken. Diese Tiere sind sehr widerstandsfähig, besitzen die Fähigkeit für längere Zeit ohne Nahrung zu überleben und können verschiedene Krankheiten übertragen. Im Gegensatz zu anderen sozialen Insekten wie zum Beispiel Ameisen, leben Kakerlaken in sehr einfach strukturierten Gemeinschaften ohne eigentliche Hierarchie. Sie bevorzugen vor allem dunkle und feuchte Ecken und rotten sich in diesen gerne in grösseren Gruppen zusammen. Doch wer entscheidet in einer Gruppe ohne eigentlichen Chef, wo man sich niederlassen soll? Eine Möglichkeit stellt die bei den Insekten weit verbreitete Kommunikation mit Duftstoffen dar. Mit diesen so genannten Pheromonen markieren die Kakerlaken ihren Weg und informieren sich gegenseitig über ihren Aufenthaltsort. „Pheromone allein reichen allerdings nicht aus, um eine Gruppierung der Kakerlaken auszulösen“, meint Fabien Tâche, Erbauer der Miniaturroboter und Doktorand in Siegwarts Gruppe. Deshalb würde eine simple, mit Pheromonen getränkte Falle auch nicht genügen, um diesen Tieren im Haushalt Herr zu werden. „Um die Insekten an einem bestimmten Ort zu versammeln, ist eine Kombination aus Pheromonen und Kakerlaken-ähnlichen Bewegungen nötig“, so Tâche. Die Roboter als Artgenossen der KakerlakenUm solche Versammlungen der Schädlinge künstlich auslösen zu können, konstruierten die ETH-Ingenieure aus der Gruppe von Siegwart zündholzschachtelgrosse Miniaturroboter mit dem Namen Insbot. Diese Roboter wurden mit verschiedensten Sensoren und Kameras ausgestattet, die es ihnen ermöglichten, sich sowohl gegenseitig, als auch Kakerlaken zu erkennen. „ Die grösste Schwierigkeit beim Bau der Roboter war die Grösse. So kleine Roboter zu bauen, die trotzdem über einen eigenen Antrieb und all die Technik verfügen war eine knifflige Aufgabe“, erläutert Siegwart.
Bei der Programmierung der Roboter machten sich die Ingenieure eine einfache Verhaltensweise der Kakerlaken zunutze. Verharrt einer der Artgenossen für längere Zeit an einem bestimmten Ort, machen sich die anderen dahin auf, denn es könnte sich dabei um eine interessante Futterquelle oder ein schattiges Plätzchen handeln. Dabei sind Ansammlungen mehrerer Kakerlaken noch viel verlockender, denn es muss umso mehr Nahrung oder Schatten vorhanden sein, wenn sich viele Tiere dafür interessieren. Falls Roboter, die ein solches Verhalten aufweisen von den Insekten als Artgenossen akzeptiert werden, wäre es möglich die Kakerlaken auch zu einer kleinen Gruppe von Robotern zu locken. Die Ingenieure programmierten die kleinen Roboter nun so, als ob sie Kakerlaken auf Schattensuche wären. Dabei war es ihnen möglich, die mäandrischen Suchbewegungen, das plötzliche Stehenbleiben und das Versammeln der Insekten zu imitieren. Genau wie die Schädlinge suchten die Roboter die gegenseitige Nähe und versammelten sich in kleinen Gruppen an dunklen Stellen. Um die Illusion für die Kakerlaken perfekt zu machen, wurden die Insbots zusätzlich mit Pheromon angereichertem Papier umwickelt. Als die Kakerlaken zu den Robotern gegeben wurden, zeigten sie sich anfangs noch etwas irritiert durch die kleinen High-Tech Maschinen. Nach einigen Minuten gewöhnten sie sich aber an die Präsenz der Miniaturroboter, die sich wie ihre Artgenossen verhielten und auch so dufteten. Da Kakerlaken schlecht sehen, war das Aussehen der Roboter nebensächlich. „Wichtig war jedoch, dass die Roboter möglichst klein sind und wenig Vibrationen verursachen, da die Insekten darauf sehr empfindlich reagieren“, erklärt Siegwart. Im weiteren Verlauf des dreistündigen Versuchs war es den Insbots dann tatsächlich gelungen, als Kakerlaken durchzugehen. So konnten sich die Roboter ohne Probleme in die Gesellschaft der Insekten einfügen und wurden von den Kakerlaken als Artgenossen akzeptiert. In einem weiteren Experiment war es den Maschinen sogar möglich, das kollektive Verhalten der Schädlinge noch weiter zu beeinflussen. Dazu wurden die Roboter darauf programmiert, sich, anders als die Kakerlaken, unter dem helleren von zwei Unterschlüpfen zu versammeln. Als Folge davon legten auch die Kakerlaken, ohne unter Zwang zu stehen, Verhaltensweisen an den Tag, die sie normalerweise nicht haben. So folgten die von Natur aus lichtscheuen Kakerlaken den kleinen, nach Pheromon duftenden Robotern in den hellen Unterschlupf . „Dass sich Roboter in solchem Masse in eine Tierpopulation einschleichen können, ist einzigartig“, schwärmt Siegwart. Bald auch Hühner von Robotern beeinflusstDie Roboter als künstliche Kammerjäger in Gebäuden einzusetzen ist jedoch noch Zukunftsmusik: „Die Fortbewegung des Insbot wurde an die idealisierte Oberfläche der Versuchsanlage angepasst. Deshalb wären die Maschinen in einem normalen Haushalt schlichtweg überfordert“, erklärt Siegwart. Eine einfache Türschwelle stellt für einen solchen Miniaturroboter ein unüberwindbares Hindernis dar. Zudem müssten die Maschinen in der Lage sein auch Wände zu erklimmen, um den Kakerlaken überallhin folgen zu können, was im Moment technisch noch nicht möglich ist. Die ETH-Ingenieure um Siegwart wollen in näherer Zukunft den Kakerlakenroboter nicht optimieren. Was sie sich aber vorstellen könnten, ist die Erkenntnisse aus dem Projekt LEURRE anderweitig zu nutzen. Zum Beispiel um Roboter-Hühner herzustellen, die eine Leitfunktion in einer Hühnerpopulation übernehmen könnten. Diese Idee wäre auch für die Industrie nicht uninteressant, denn Hühner leiden in grossen Farmen oft unter Bewegungsmangel. „Wäre das Geflügel von Geburt an einen solchen Roboter gewöhnt, wäre es theoretisch möglich, sein Bewegungs- und Fressverhalten dadurch zu beeinflussen“, erläutert Siegwart. Dies könnte die Haltung der Hühner vereinfachen, und deren Wohlbefinden verbessern. Footnotes:
|
||||||||||||